$$ \huge{\underline{\textbf{ Policy Iteration }}} $$
In [1]:
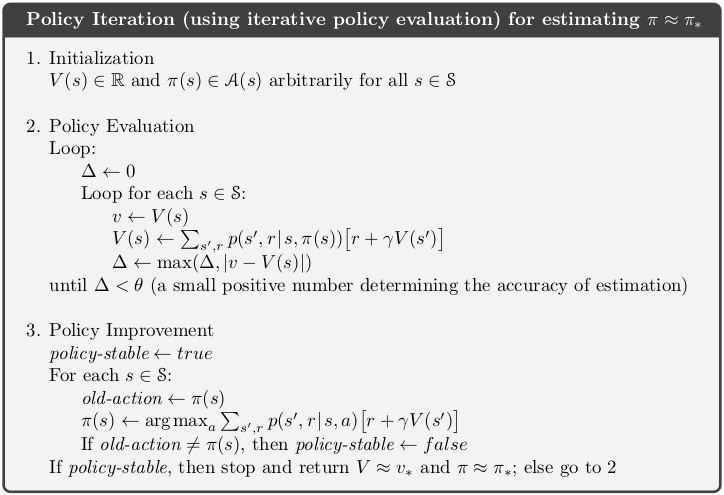
# Naive implementation (for loops are slow), but matches the box
def policy_iter(env, gamma, theta):
"""Policy Iteration Algorithm
Params:
env - environment with following required memebers:
env.nb_states - number of states
env.nb_action - number of actions
env.model - prob-transitions and rewards for all states and actions, see note #1
gamma (float) - discount factor
theta (float) - termination condition
"""
# 1. Initialization
V = np.zeros(env.nb_states)
pi = np.zeros(env.nb_states, dtype=int) # greedy, always pick action 0
while True:
# 2. Policy Evaluation
while True:
delta = 0
for s in range(env.nb_states):
v = V[s]
V[s] = sum_sr(env, V=V, s=s, a=pi[s], gamma=gamma)
delta = max(delta, abs(v - V[s]))
if delta < theta: break
# 3. Policy Improvement
policy_stable = True
for s in range(env.nb_states):
old_action = pi[s]
pi[s] = np.argmax([sum_sr(env, V=V, s=s, a=a, gamma=gamma) # list comprehension
for a in range(env.nb_actions)])
if old_action != pi[s]: policy_stable = False
if policy_stable: break
return V, pi
Helper Functions:
In [2]:
def sum_sr(env, V, s, a, gamma):
"""Calc state-action value for state 's' and action 'a'"""
tmp = 0 # state value for state s
for p, s_, r, _ in env.model[s][a]: # see note #1 !
# p - transition probability from (s,a) to (s')
# s_ - next state (s')
# r - reward on transition from (s,a) to (s')
tmp += p * (r + gamma * V[s_])
return tmp
Note #1¶
env.model parameter is taken directly from OpenAI API for FrozenLake-v1 (where it is called env.P, see below). It is a nested structure which describes transition probabilities and expected rewards, for example:
>>> env.model[6][0]
[(0.3333333333333333, 2, 0.0, False),
(0.3333333333333333, 5, 0.0, True),
(0.3333333333333333, 10, 0.0, False)]Has following meaning:
- from state 6 and taking action 0, there is 0.33 probability transitioning to state 2, with reward 0.0, transition is non-terminal
- from state 6 and taking action 0, there is 0.33 probability transitioning to state 5, with reward 0.0, transition is terminal, MDP ends
- from state 6 and taking action 0, there is 0.33 probability transitioning to state 10, with reward 0.0, transition is non-terminal
See diagram

In [3]:
import numpy as np
import matplotlib.pyplot as plt
import gym
In [4]:
env = gym.make('FrozenLake-v0')
env.reset()
env.render()
Rename some members, but don't break stuff!
In [5]:
if not hasattr(env, 'nb_states'): env.nb_states = env.env.nS
if not hasattr(env, 'nb_actions'): env.nb_actions = env.env.nA
if not hasattr(env, 'model'): env.model = env.env.P
Perform policy iteration
In [6]:
V, pi = policy_iter(env, gamma=1.0, theta=1e-8)
print(V.reshape([4, -1]))
Show optimal policy, basically avoid holes in the lake
In [7]:
a2w = {0:'<', 1:'v', 2:'>', 3:'^'}
policy_arrows = np.array([a2w[x] for x in pi])
print(np.array(policy_arrows).reshape([-1, 4]))
Check correct
In [8]:
correct_V = np.array([[0.82352941, 0.82352941, 0.82352941, 0.82352941],
[0.82352941, 0. , 0.52941176, 0. ],
[0.82352941, 0.82352941, 0.76470588, 0. ],
[0. , 0.88235294, 0.94117647, 0. ]])
correct_policy_arrows = np.array([['<', '^', '^', '^'],
['<', '<', '<', '<'],
['^', 'v', '<', '<'],
['<', '>', 'v', '<']])
assert np.allclose(V.reshape([4,-1]), correct_V)
assert np.alltrue(policy_arrows.reshape([4,-1]) == correct_policy_arrows)