$$ \huge{\underline{\textbf{ On-Policy First-Visit MC Control }}} $$
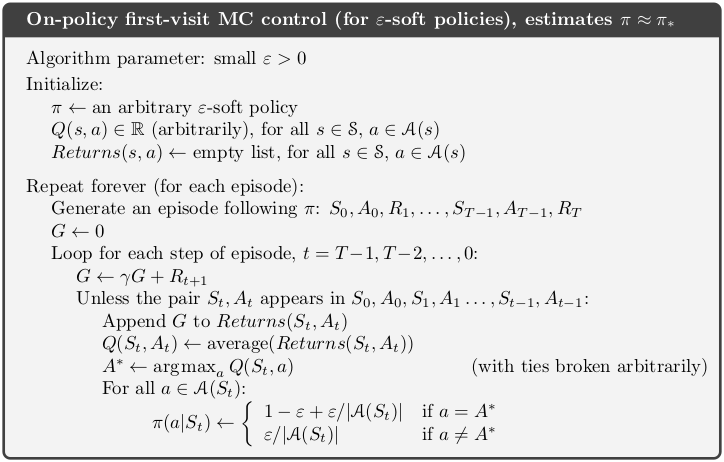
Implementation below is meant to correspond to the box as close as possible. For normal uses see alternative implementation below.
In [1]:
def on_policy_MC_control(env, ep, gamma, eps):
"""Monte Carlo ES Control
Params:
env - environment
ep - number of episodes to run
gamma - discount factor
eps - epsilon-greedy parameter
"""
def policy(St, pi):
return np.random.choice(env.act_space, p=[pi[(St,a)] for a in env.act_space])
pi = defaultdict(lambda: 1/env.nb_actions) # probability of action (def random)
Q = defaultdict(float) # default Q value: 0
Returns = defaultdict(list) # dict of lists
for _ in range(ep):
traj, T = generate_episode(env, policy, pi)
G = 0
for t in range(T-1,-1,-1):
St, _, _, At = traj[t] # (st, rew, done, act)
_, Rt_1, _, _ = traj[t+1]
G = gamma * G + Rt_1
if not (St, At) in [(traj[i][0], traj[i][3]) for i in range(0, t)]:
Returns[(St, At)].append(G)
Q[(St, At)] = np.average(Returns[(St, At)])
A_star = argmax_rand([Q[(St,a)] for a in range(env.nb_actions)]) # int
for a in range(env.nb_actions):
if a == A_star: pi[(St,a)] = 1 - eps + eps/env.nb_actions
else: pi[(St,a)] = eps/env.nb_actions
return Q, pi
Helper Functions:
In [2]:
def generate_episode(env, policy, *params):
"""Generete one complete episode.
Returns:
trajectory: list of tuples [(st, rew, done, act), (...), (...)],
where St can be e.g tuple of ints or anything really
T: index of terminal state, NOT length of trajectory
"""
trajectory = []
done = True
while True:
# === time step starts here ===
if done: St, Rt, done = env.reset(), None, False
else: St, Rt, done, _ = env.step(At)
At = policy(St, *params)
trajectory.append((St, Rt, done, At))
if done: break
# === time step ends here ===
return trajectory, len(trajectory)-1
In [3]:
def argmax_rand(arr):
# break ties randomly, np.argmax() always picks first max
return np.random.choice(np.flatnonzero(arr == np.max(arr)))
Alternative Implementation¶
This implementation is meant for normal use. Main changes:
- no need to keep every-single-return-ever in long list - just keep sum and counter for each state-action pair.
- no need to express policy explicitly in this case - pi dictionary removed
In [4]:
def on_policy_MC_control_2(env, ep, gamma, eps):
"""Monte Carlo ES Control
Params:
env - environment
ep [int] - number of episodes to run
gamma [float] - discount factor
eps [float] - epsilon-greedy parameter
"""
def policy(St, Q, eps):
if np.random.rand() > eps:
return argmax_rand([Q[(St,a)] for a in env.act_space])
else:
return np.random.choice(env.act_space)
Q = defaultdict(float) # default Q value: 0
Counts = defaultdict(int)
Returns = defaultdict(float) # stores SUM
for _ in range(ep):
traj, T = generate_episode(env, policy, Q, eps)
G = 0
for t in range(T-1,-1,-1):
St, _, _, At = traj[t] # (st, rew, done, act)
_, Rt_1, _, _ = traj[t+1]
G = gamma * G + Rt_1
# Do away with first-visit check
# if not (St, At) in [(traj[i][0], traj[i][3]) for i in range(0, t)]:
Counts[(St, At)] += 1
Returns[(St, At)] += G
Q[(St, At)] = Returns[(St, At)] / Counts[(St, At)]
return Q
Solve Blackjack¶
In [5]:
import numpy as np
import matplotlib.pyplot as plt
from collections import defaultdict
from mpl_toolkits.mplot3d import axes3d
import gym
Create environment
In [6]:
env = gym.make('Blackjack-v0')
if not hasattr(env, 'nb_actions'): env.nb_actions = 2
if not hasattr(env, 'act_space'): env.act_space = [0, 1]
Plotting, boring
In [7]:
from helpers_0504 import plot_blackjack
Run
In [8]:
# Q, _ = on_policy_MC_control(env, ep=1000000, gamma=1.0, eps=0.1) # +5min ??
# plot_blackjack(Q)
In [9]:
Q = on_policy_MC_control_2(env, ep=1000000, gamma=1.0, eps=0.1) # ~2-3min?
plot_blackjack(Q)
