$$ \huge{\underline{\textbf{ Q-Learning }}} $$
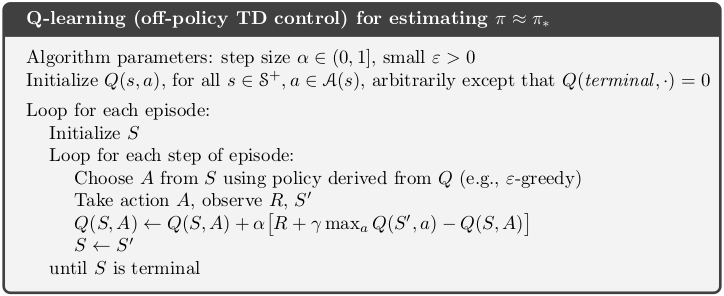
def q_learning(env, ep, gamma, alpha, eps):
"""Q-Learning (off-policy TD control)
Params:
env - environment
ep - number of episodes to run
gamma - discount factor [0..1]
alpha - step size (0..1]
eps - epsilon-greedy param
"""
def policy(st, Q, eps):
if np.random.rand() > eps:
return argmax_rand([Q[st,a] for a in env.act_space])
else:
return np.random.choice(env.act_space)
Q = defaultdict(float) # default zero for all, terminal MUST be zero
for _ in range(ep):
S = env.reset()
while True:
A = policy(S, Q, eps)
S_, R, done = env.step(A)
max_Q = np.max([Q[S_,a] for a in env.act_space])
Q[S,A] = Q[S,A] + alpha * (R + gamma * max_Q - Q[S,A])
S = S_
if done: break
return Q
Helper functions:
def argmax_rand(arr):
# break ties randomly, np.argmax() always picks first max
return np.random.choice(np.flatnonzero(arr == np.max(arr)))
 |
 |
Solve Cliff Walking¶
import numpy as np
import matplotlib.pyplot as plt
from collections import defaultdict
from helpers_0605 import plot_cliffwalk
Auxiliary code here: helpers_0605.py
Cliff Walking environment, as described in the book example 6.6, along with my x,y convention.
class CliffWalkingEnv:
def __init__(self):
self.act_space = [0, 1, 2, 3] # LEFT = 0, DOWN = 1, RIGHT = 2, UP = 3
self.reset()
def reset(self):
self._x, self._y = 0, 0 # agent initial position
return (0, 0)
def step(self, action):
"""actions: LEFT = 0, DOWN = 1, RIGHT = 2, UP = 3"""
self._x, self._y = self.transition(self._x, self._y, action)
if self._x in range(1,11) and self._y == 0: # CLIFF spanning x=[1..10]
self._x, self._y = 0, 0 # teleport to start
return (self._x, self._y), -100, False # return -100 reward
if self._x == 11 and self._y == 0: # GOAL at (11,0)
return (self._x, self._y), -1, True # -1, terminate
return (self._x, self._y), -1, False # NORMAL states
def transition(self, x, y, action):
"""Perform transition from [x,y] given action. Does not teleport."""
if action == 0: x -= 1 # left
elif action == 1: y -= 1 # down
elif action == 2: x += 1 # right
elif action == 3: y += 1 # up
else: raise ValueError('Action must be in [0,1,2,3]')
x = np.clip(x, 0, 11) # x range is [0..11] incl.
y = np.clip(y, 0, 3) # y range is [0..3] incl.
return x, y
def get_path(self, Q):
"""Returns a path agent would take, if following greedy Q-based policy"""
x, y = 0, 0 # agent starting position
path = [(x, y)] # save starting position
for _ in range(100): # limit steps in case policy is loopy
A_star = np.argmax([Q[(x,y),a] for a in [0, 1, 2, 3]]) # pick best action
x, y = self.transition(x, y, A_star) # take one step
path.append((x,y)) # save to path
if x in range(1,11) and y == 0: # CLIFF
path.append((0, 0)) # teleport
if x == 11 and y == 0: break # GOAL at (11,0)
return path
Create environment
env = CliffWalkingEnv()
Solve. 100 episodes usually enough.
Q = q_learning(env, ep=100, gamma=1., alpha=.5, eps=.1)
path = env.get_path(Q)
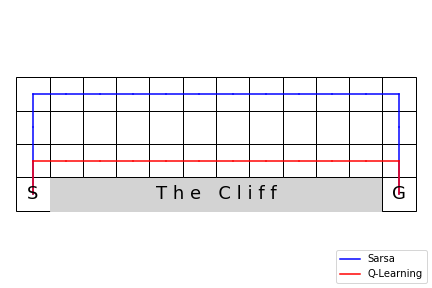
plot_cliffwalk(Q, path_red=path)

Recreate example 6.6¶
We need to bring back Sarsa algorithm from section 5.5. We also need to modify both algorithms to track cumulative reward (R_sum) at each episode.
def sarsa_ext(env, ep, gamma, alpha, eps):
def policy(st, Q, eps):
if np.random.rand() > eps: return argmax_rand([Q[st,a] for a in env.act_space])
else: return np.random.choice(env.act_space)
Q = defaultdict(float) # default 0
rewards = [] # Change: track episode rewards
for _ in range(ep):
rewards.append(0) # <--
S = env.reset()
A = policy(S, Q, eps)
while True:
S_, R, done = env.step(A)
A_ = policy(S_, Q, eps)
Q[S,A] = Q[S,A] + alpha * (R + gamma * Q[S_,A_] - Q[S,A])
S, A = S_, A_
rewards[-1] += R # <--
if done: break
return Q, rewards
def q_learning_ext(env, ep, gamma, alpha, eps):
def policy(st, Q, eps):
if np.random.rand() > eps: return argmax_rand([Q[st,a] for a in env.act_space])
else: return np.random.choice(env.act_space)
Q = defaultdict(float) # default 0
rewards = [] # Change: track episode rewards
for _ in range(ep):
rewards.append(0) # <--
S = env.reset()
while True:
A = policy(S, Q, eps)
S_, R, done = env.step(A)
max_Q = np.max([Q[S_,a] for a in env.act_space])
Q[S,A] = Q[S,A] + alpha * (R + gamma * max_Q - Q[S,A])
S = S_
rewards[-1] += R # <--
if done: break
return Q, rewards
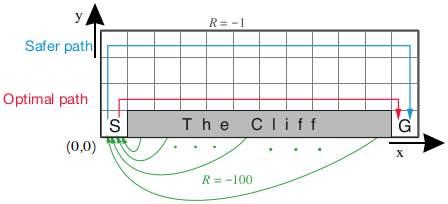
Example 6.6 - safe/optimal paths¶
Solve both environments. May take more than one attempt to get exactly right.
Q_ql, _ = q_learning_ext(env, ep=100, gamma=1., alpha=.5, eps=.1)
Q_sr, _ = sarsa_ext(env, ep=10000, gamma=1., alpha=.5, eps=.1)
Plot both solutions.
path_qlearn = env.get_path(Q_ql)
path_sarsa = env.get_path(Q_sr)
plot_cliffwalk(path_blue=path_sarsa, path_red=path_qlearn,
labels=['Sarsa', 'Q-Learning'], saveimg=None) # 'assets/fig_0605a.png'

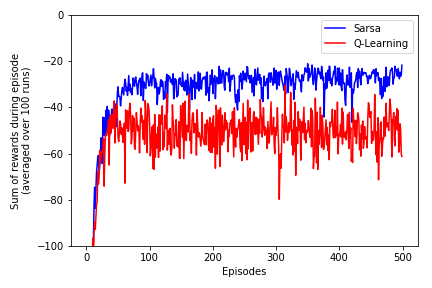
Example 6.6 - online performance comparison¶
I was not able to reproduce wavy look of second plot in example 6.6. Bood doesn't seem to desribe how exactly second plot was produced. Following convention from the rest of the book I averaged data over multiple runs, which seems to produce similar results, but with different noise distribution. If anyone know how exactly that plot was reproduced drop me a msg.
- We will run sarsa and q_learning 100 times each
- Each run will be consisted of 500 complete episodes $t\in[1..T]$
- Each episode will provide single data point equal to sum of reward in this episode
def perform_experiments(n_runs):
R_ql_runs = [] # sum of rewards, dim [n_runs, nb_episodes]
R_sr_runs = []
for i in range(n_runs): # 100 runs
# 500 episodes, each episode providing one data point
_, hist = q_learning_ext(env, ep=500, gamma=1., alpha=.5, eps=.1)
R_ql_runs.append(hist)
_, hist = sarsa_ext(env, ep=500, gamma=1., alpha=.5, eps=.1)
R_sr_runs.append(hist)
# Average over all runs
R_ql_avg = np.average(R_ql_runs, axis=0)
R_sr_avg = np.average(R_sr_runs, axis=0)
return R_ql_avg, R_sr_avg, n_runs
Run experiments
R_ql_avg, R_sr_avg = perform_experiments(100) # ~2min
Plot results
fig = plt.figure()
ax = fig.add_subplot(111)
ax.plot(R_sr_avg, color='blue', label='Sarsa')
ax.plot(R_ql_avg, color='red', label='Q-Learning')
ax.set_ylim([-100,0])
ax.legend()
ax.set_xlabel('Episodes')
ax.set_ylabel('Sum of rewards during episode\n(averaged over '+str(n_runs)+' runs)')
plt.tight_layout()
# plt.savefig('assets/fig_0605b.png')
plt.show()
